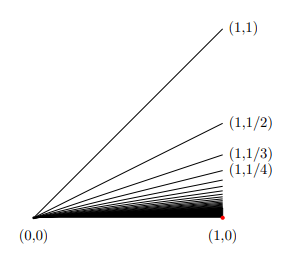
Kompaktlık ve bağlantılılık topolojininin en önemli iki özelliğidir. Kompaktlık kelimesi, bu özelliğin neye benzediği hakkında pek bilgi vermese de, “bağlantılılık” tam da ismiyle müsemma bir özellik gibi duruyor. Örneğin, bağlantılı bir küme, tek bir parçadan oluşmalı ve içinde alınan her iki noktayı, yine kümenin içinde kalacak bir çizgi ile birleştirmek mümkün olmalıymış gibi geliyor. Çoğu küme için bu durum geçerli olabilir, fakat bazı patolojik kümeler için bu sezgisel yaklaşım pek de çalışmıyor. Örneğin aşağıdaki şekilde gösterilen sonsuz süpürge uzayını (infinite broom) ele alalım. Bu uzay, noktasından noktasına giden doğru parçaları ile noktasının birleşiminden oluşur. x-ekseni üzerindeki aralığı ise kümeye dahil değildir.
Sonsuz Süpürge
Sonsuz süpürge temel olarak iki parçadan oluşur. Doğru parçaları ve tek başına duran noktası. Doğrular üzerinden aldığımız bir noktayı, küme içinde kalmak şartıyla, noktasına bağlamak mümkün görünmüyor. Fakat bu uzay topolojik olarak bağlantılı bir uzay. Demek ki, tek parça olma ve her iki noktayı birbirine bağlayabilme, bağlantılı küme tanımı için yeterli değil ve aslında iki farklı bağlantılılık kavramına ihtiyacımız var.
Bunlardan ilki, sezgisel olarak da bulabildiğimiz, “yol bağlantılılık”. Eğer bir kümesi içerisinde alınan her iki noktayı, yine ‘nın içinde kalacak bir yol ile birbirine bağlayabiliyorsak, kümesi yol bağlantılıdır diyeceğiz. Fakat burada yol kavramını matematiksel olarak ifade etmemiz gerekiyor.
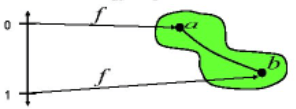
Herhangi iki noktası arasında bir yol ile kastedilen şey, , özelliklerini sağlayan sürekli bir fonksiyondur.
a’dan b’ye bir yol
Diğer taraftan bağlantılılık tanımı, alışılagelen tanımlamalardan biraz farklıdır. Çünkü bu kez önce “bağlantısız” olma tanımını yapıp, onun yardımıyla bağlantılılık tanımına gideceğiz.
Eğer uzayımız, boştan farklı, ayrık iki açık kümenin birleşimi olarak yazılabiliyorsa, bu uzay bağlantısızdır diyeceğiz. Bu şekilde bir yazım mümkün değilse de, kümemiz bağlantılı olacak.
Yol bağlantılı her uzay bağlantılıdır. Yani eğer her iki nokta arasında bir bağlantı kurmak mümkünse, kümeyi iki farklı parçaya ayırmak da mümkün olmayacaktır. Fakat tersi her zaman doğru değildir. Örneğin sonsuz süpürgenin yol bağlantılı olmadığı gayet açıktır. Diğer yandan bu küme bağlantılıdır, çünkü iken, çizilen çubuklar noktası etrafında öyle sıklaşır ki, uzayı boştan farklı, ayrık açıkların birleşimi olarak yazmak mümkün olmaz.
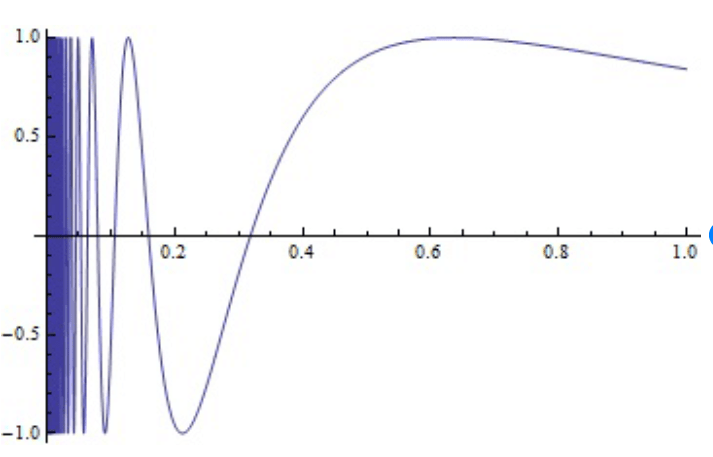
Yol bağlantılı olmayıp bağlantılı olan kümelerin en güzel örneği, tanımı ve grafiği aşağıdaki gibi olan, Topolojicinin Sinüs Eğrisidir.
Topolojicinin Sinüs Eğrisi
Burada, sezgisel olarak, sonsuz süpürgeye benzer bir durum söz konusu. Yani salınımlar y-ekseni üzerindeki aralığında oldukça sıklaşıyor. İşte bu nedenle kümeyi parçalamak olası görünmüyor. Diğer taraftan, kısmından alınan bir nokta ile doğru parçası üzerinde alınan herhangi iki noktayı bağlayan bir yol bulunamıyor.
Şimdi biz, topoloji kitaplarınının vazgeçilmezi olan ve çoğunlukla kanıtsız verilen, “topolojicinin sinüs eğrisi bağlantılıdır fakat yol bağlantılı değildir” ifadesini ispatlamaya çalışalım.
Öncelikle kümesini ve olmak üzere iki parçaya ayıralım. Burada olmak üzere, olduğu açıktır.
(1)Bağlantılı bir uzayın sürekli bir fonksiyon altındaki görüntüsü de bağlantılıdır.
O halde, fonksiyonu aralığında sürekli ve aralığı bağlantılı olduğundan, kümesinin de bağlantılı oluğunu açıktır.
(2)Bağlantılı bir kümenin kapanışı da bağlantılıdır.
Demek ki olduğunu gösterebilirsek, ‘nin bağlantılı olduğu sonucuna ulaşabiliriz.
İlk olarak kapsaması için bir alalım.
(3) bir metrik uzay, ve olsun. Bu durumda, olması için gerek ve yeter koşul, olacak şekilde bir dizisi olmasıdır.
O halde, olduğunu görmek için, kümesinde, olacak şekilde bir dizisi elde etmeye çalışalım. Eğer oluyorsa olarak alabiliriz. Ama eğer oluyorsa, diziyi yazmak öyle kolay olmayacak. Öncelikle ise, () biçimindedir. Ayrıca olacak şekilde bir vardır, çünkü , görüntü kümesi olan örten bir fonksiyondur. Diğer taraftan, fonksiyonu periyotlu olduğundan, her için ‘dir. Şimdi, olarak seçersek, her için olur. Hatta, iken olduğundan elde edilir. Burada herhangi bir için, elde ettiğimiz dizi aslında, x-eksenine paralel olan ve bu noktasından geçen doğrunun, ‘in grafiğini kestiği noktalardan oluşan dizidir.
Şimdi diğer kapsamayı, yani olduğunu görmeye çalışalım. Öncelikle kümelerin tanımından olduğu açıktır. Burada eğer kümesinin kapalı olduğunu kanıtlayabilirsek, olur ve böylece amacımıza ulaşmış oluruz. Bunun için de, (3)‘ü kapalı bir kümesine uyarlayarak elde edebileceğimiz,
(4) kümesinin kapalıolması için gerek ve yeter koşul her, dizisi için olması (yani‘nın, tüm limit noktalarını içermesidir)
teoremini kullanalım.
Bunun için kümesinde olacak şekilde bir dizisi alalım ve olduğunu gösterelim. Öncelikle, ve olduğundan, ve özellikleri sağlanır. Eğer ise, ve olduğundan, elde etmiş oluruz. Şimdi ikinci olasılığı yani olma durumunu inceleyelim. Bunun için önce ‘in yalnızca pozitif sayılardan oluşan bir -komşuluğunu alalım. (Burada seçmemiz yeterli olacaktır.) olduğundan, her için olacak şekilde bir doğal sayısının varlığından söz etmek mümkündür. Yani demek ki, dizisinin sonlu sayıdaki bazı elemanları hariç olmak üzere, varsayımını yapabiliriz. İşte bu sonsuz çoklukta eleman için ve böylece ‘dir. Ayrıca, fonksiyonu aralığında sürekli olduğundan,
sağlanır ve böylece ‘dir.
Şimdi de, sinüs eğrisinin yol bağlantılı olmadığını gösterelim. Grafikten de anlaşılacağı gibi esas problem, ‘dan alınan bir nokta (örneğin (0,1) noktası) ile ‘den alınan bir nokta arasında bir yol bulunamamasıdır. Tabii bunu usulünce yapmak için, bu şekilde alınan iki noktayı birleştiren bir yol olduğunu kabul edip, bunun bir çelişkiye yol açacağını görmeye çalışalım. O halde, tersine, ve olacak şekilde sürekli bir fonksiyonunun olduğunu varsayalım. sürekli olduğundan, özel olarak için, iken olacak şekilde bir vardır. Burada aralığı bağlantılı olduğundan, (1)‘den de bağlantılıdır.
olsun. , birinci izdüşüm fonksiyonu olmak üzere, ile ‘nin bileşkesini, yani fonksiyonunu ele alalım. Öncelikle, izdüşüm fonksiyonları sürekli olduğundan, bu bileşke fonksiyonu da süreklidir. Bu nedenle kümesi, ‘nin bağlantılı bir alt kümesidir. Ayrıca ve olduğundan, bu küme 0’ı ve ‘ı içerir.
(5) bağlantılı bir alt küme ise, bir aralıktır.
O halde , yani ‘deki noktaların x-koordinatlarının kümesi, tüm aralığını içerir. Böylece için olacak şekilde bir vardır.
Şimdi, yeterince büyük bir için, özel olarak, olarak seçelim. Bu durumda ve böylece için olur. Fakat bu durum, daha önce elde etmiş olduğumuz koşulu ile çelişir. Çünkü, olmalıdır.
Sonuç olarak, Topolojicinin Sinüs Eğrisi, bağlantılı fakat yol bağlantılı olmayan bir kümedir.
“İntegral ne işe yarar?” sorusuna verilebilecek en klasik yanıt muhtemelen “eğri altında kalan alanı bulmayı sağlar” olacaktır. Bu yazıda, çok da derinlere inmeden, Riemann ve Lebesque integrallerinden bahsedeceğiz. Öncelikle Riemann integralinin tanımına kısaca bir göz atalım. Bu sayede, Riemann integralinin yetersiz yönlerini ve halihazırda bir integral hesaplama yöntemi varken, neden bir de Lebesque integraline ihtiyaç duyulduğunu da anlamış olacağız.
Elimizde bir fonksiyonu olsun. eğrisinin altında kalan alanı bulmak için, aralığını n parçaya bölelim ve ilgili bölgede n adet dikdörtgen elde edelim. Daha sonra ise bu dikdörtgenlerin alanlarını toplayalım. Burada her bir dikdörtgenin kısa kenar uzunluğunun olduğu açıktır. Uzun kenar için ise farklı seçimler yapmak mümkündür. Eğer, aşağıdaki şeklin sol kısmında görüldüğü gibi, ‘nin bu aralıkta aldığı değerlerin infimumunu seçersek, oluşturduğumuz toplama alt toplam denir. Şeklin sağında görüldüğü gibi, o aralıkta alınan değerlerin supremumunu seçersek, bu toplama üst toplam denir.
Alt Toplam ve Üst Toplam
Şimdi biz, infimum ve supremum gibi özel seçimler yapmayı bırakıp, her bir aralıktan rastgele bir noktası seçelim ve uzun kenarı olan dikdörtgenler oluşturalım. Oluşturulan tüm bu dikdörtgenlerin alanlarının toplamı olacaktır. Bu şekilde elde edilen toplamın ismi ise Riemann toplamıdır. Burada dikkat edilmesi gereken şey, dikdörtgenlerin sayısı ne kadar çok olursa, hata payının o kadar az olacağı ve alanın gerçek değerine o kadar yaklaşılmış olacağıdır.
Bunun için de yapılması gereken, ‘nin parçalanma sayısı olan n’yi sonsuza yaklaştırmaktır. İşte Riemann integrali dediğimiz şey aslında
limitidir. Burada ‘yi üzerinde bir fonksiyon olarak seçersek, integral hesabı yaparken kullandığımız yöntemi bir üst boyuta taşımamız gerekir. Bu kez tanım kümemizi belli parçalara bölüp, fonksiyonun altında kalan bölgenin dikdörtgen prizmalarından oluştuğunu ve bu prizmaların hacimlerini topladığımızı düşünebiliriz. Bundan sonra yapılacak şey ise, biraz önce kullanılan yönteme benzer şekilde, x ve y-eksenini ayırdığımız parçaların sayısını sonsuza götürmektir.
Peki ‘nin tanım kümesi herhangi bir n doğal sayısı için ya da soyut bir uzayı olursa, bu kez nasıl bir yol izleyeceğiz? Daha geniş bir tanım kümesi ailesi için çözüm üretebilen bir integral alma yöntemimiz olsaydı fena olmaz mıydı? İşte Rieman integralinden daha genel bir integrale ihtiyaç duyulmasının sebeplerinden biri budur diyebiliriz.
Şimdi , biçiminde tanımlı olan Dirichlet fonksiyonunu ele alalım. olarak, ‘nin bu aralıktaki en büyük değeri olan 1’i alırsak, Riemann toplamı olarak bulunur. Diğer taraftan, ‘nin en küçük değeri olan 0’ı kullandığımızda, Riemann toplamı olur. Bu iki toplam birbirinden farklı olduğundan, fonksiyonunun Riemann integrallenebilir olmadığını söyleyebiliriz. İşte Riemann integralinin diğer bir zayıf yönü de, sürekliliğe olan bağlılığıdır. Her sürekli fonksiyonun Riemann integrallenebilir olduğunu biliyoruz. Fakat karşımıza, Dirichlet fonksiyonu gibi sürekli olmayan bir fonksiyon çıktığında, bir integrallenebilme sorunu yaşamamız mümkündür. Bu problem, dikdörtgenlere ayırma işleminin imkansız göründüğü, Volterra fonksiyonu gibi patolojik fonksiyonlarda da karşımıza çıkacaktır.
Volterra Fonksiyonu
Son olarak, Riemann integralinde, integral ve limit operasyonlarının sırasını kafamıza göre değiştirmenin mümkün olmadığını söyleyebiliriz. Yani bir aralığı üzerinde tanımlı, sürekli fonksiyonlar dizisi verildiğinde
eşitliğinin sağlanması için, bu fonksiyon dizisinin düzgün yakınsak olması gerekir.
Karşılaşılan tüm bu sorunları ve Riemann integralinden daha genel bir integrale neden ihtiyaç duyulduğunu anladığımıza göre, artık Lebesque integralinin elde ediliş yöntemine geçebiliriz. Riemann integralini anlatırken, ele aldığımız fonksiyonların tanım kümelerinin değişebileceğinden bahsetmiştik. Fakat dikkat edersek, tüm bu fonksiyonların görüntü kümesi oluyor, yani aslında her biri reel değerli birer fonksiyon. O halde tanım kümesini parçalara ayırmak yerine, hiçbir zaman değişmeyen görüntü kümesini parçalara ayırmak gayet mantıklı bir yaklaşım olacaktır.
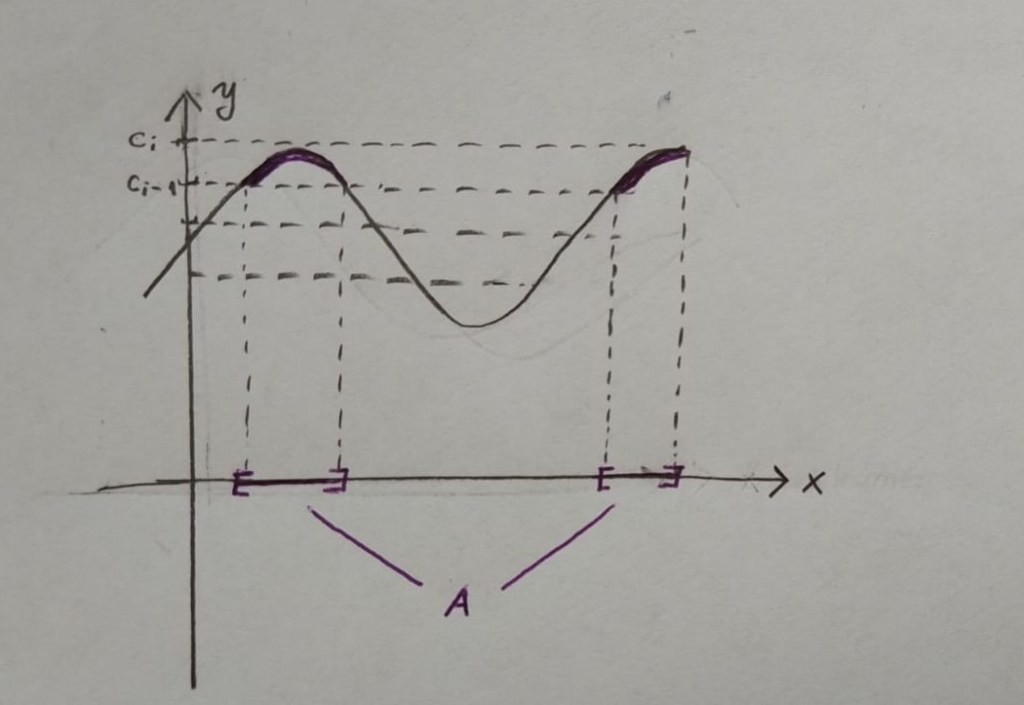
Yukarıdaki şekilde gösterilen fonksiyonunu ele alalım. Burada x-ekseni ‘nin tanım kümesini temsil etsin. Yani burası sadece reel sayılar değil, herhangi bir ya da soyut bir uzayı da olabilsin. Diğer taraftan y-ekseni ‘nin görüntü kümesini temsil ettiği için, onu reel eksen olarak ele alalım. Şimdi, y-eksenini parçalara ayıralım ve fonksiyonunun her bir aralıkta ön görüntüsünü aldığımızı düşünelim. Yukarıdaki şekilde, iki aralığın birleşimi olan kümesi, fonksiyonun, aralığında kalan kısmının ön görüntüsüdür. Riemann integralini oluştururken, x-ekseni üzerinde elde ettiğimiz her bir parçanın görüntüsünü bulmuştuk ve fonksiyonumuz sürekli olduğundan, bu görüntülerin her biri bağlantılı bir küme olmuştu. Fakat görüyoruz ki, burada kümesi bağlantılı bir küme değil. Peki acaba kümesinin büyüklüğü, ya da ölçüsü nedir? Tanım kümesi olsaydı uzunluğunu, olsaydı alanını, olsaydı hacmini ölçebilirdik. Fakat burada, birbirinden farklı her tanım kümesi için ayrı ayrı işlem yapmamak adına, genel bir ölçü tanımına ihtiyacımız olacaktır. Yani daha kapsamlı bir integral elde etmek istiyorsak, herhangi bir uzayında, kümelerin nasıl ölçülebileceğine dair bir tanımımız olması daha çok işimize yarayacaktır. Bu da bizi ölçü nedir, ölçü uzayı nasıl bir uzaydır gibi sorulara götürür. Bu kavramları daha detaylı öğrenmek isteyenler buradan devam edebilirler. Biz kabaca, ölçünün, bir -cebiri üzerinde tanımlı ve belli özelliklere sahip bir dönüşüm olduğunu söyleyip yolumuza devam edelim. Elimizdeki fonksiyonun bir ölçü uzayı üzerinde tanımlı olduğunu varsayalım ve bir kümesinin ölçüsünü ile gösterelim.
ve herhangi bir nokta olmak üzere, genelleşmiş dikdörtgenlerin alanları toplamı olacaktır. Bundan sonraki süreç tıpkı Riemann integralinde olduğu gibi işler. Örneğin ‘lerin seçimine göre alt ve üst toplamlar oluşur. Ekseni daha sık parçalara ayırmak ve tabii ki limit almak bizi Lebesque integralinin tanımına götürür:
Diyelim ki cebimizde bir miktar para var ve ne kadar olduğunu öğrenmek istiyoruz. Riemann integrali paraları cebimizden rastgele çıkarıp toplamaya benzer. Lebesque integrali ise, paraları önce türlerine göre sıralayıp (1 lira, 5 lira vs.) her birinden kaç tane olduğunu belirlemek ve her bir paranın değeri ile miktarını çarpıp daha sonra bunları toplamak gibidir.
Riemann integrallenebilir her fonksiyonun Lebesque integrallenebilir olduğunu söyleyebiliriz. Riemann integralinden daha genel olan bu integral sürekliliğe bağlı değildir, çünkü fonksiyonun süreksiz olduğu noktaların kümesini ölçmek mümkündür. Örneğin sonsuz adet süreksizlik noktası varsa ve bu noktaların kümesinin ölçüsü sıfırsa, bu durum integralimizin sonucunu etkilemez.
Bu arada, biraz önce Riemann integrallenebilir olmadığını gördüğümüz Dirichlet fonksiyonu Lebesque integrallebilirdir. Çünkü, yine kabaca anlatmak gerekirse, burada reel sayıların sayılabilir bir alt kümesi olan ‘in Lebesque ölçüsü sıfırdır. Diğer taraftan ‘dir ve böylece olarak bulunur.
Lebesque integrali, limit ile integral operatörlerinin yer değiştirilmesi ile ilgili de güzel sonuçlar ortaya koyar. Monoton Yakınsaklık Teoremi, Baskın Yakınsaklık Teoremi ve Fatou Lemma, bu yer değişimi ile ilgili üç farklı teoremdir.
Richard W. Hamming, “Lebesgue ve Riemann integralleri arasındaki farkın fiziksel bir anlamı olabileceğine, örneğin bir uçağın uçup uçmayacağının bu farka bağlı olabileceğine inanan var mı? Böyle bir iddia varsa, o uçakta uçmak umurumda değil” diyerek, bu iki integral arasındaki farkın gündelik hayatta pek de önem arz etmediğini iddia etmiştir. Fakat Lebesque integralinin olasılık teorisi, harmonik analiz birçok farklı teoriye ve uygulamaya katkısı vardır. Bu konuyla ilgili bir savunma metnine ise buradan ulaşmak mümkündür.







![f:[0,1]\rightarrow A](https://s0.wp.com/latex.php?latex=f%3A%5B0%2C1%5D%5Crightarrow+A&bg=ffffff&fg=333333&s=0&c=20201002)


![S=\{(x,y)\in \mathbb{R}^2 : y=\sin(\frac{1}{x}), x\in (0,1]\}\cup (\{0\}\times [-1,1])](https://s0.wp.com/latex.php?latex=S%3D%5C%7B%28x%2Cy%29%5Cin+%5Cmathbb%7BR%7D%5E2+%3A+y%3D%5Csin%28%5Cfrac%7B1%7D%7Bx%7D%29%2C+x%5Cin+%280%2C1%5D%5C%7D%5Ccup+%28%5C%7B0%5C%7D%5Ctimes+%5B-1%2C1%5D%29&bg=ffffff&fg=333333&s=0&c=20201002)
![[-1,1]](https://s0.wp.com/latex.php?latex=%5B-1%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002)

![S_0=\{0\}\times [-1,1]](https://s0.wp.com/latex.php?latex=S_0%3D%5C%7B0%5C%7D%5Ctimes+%5B-1%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002)

![S_1=\{(x,y)\in \mathbb{R}^2 : y=\sin(\frac{1}{x}), x\in (0,1]\}](https://s0.wp.com/latex.php?latex=S_1%3D%5C%7B%28x%2Cy%29%5Cin+%5Cmathbb%7BR%7D%5E2+%3A+y%3D%5Csin%28%5Cfrac%7B1%7D%7Bx%7D%29%2C+x%5Cin+%280%2C1%5D%5C%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![S_1=f((0,1])](https://s0.wp.com/latex.php?latex=S_1%3Df%28%280%2C1%5D%29&bg=ffffff&fg=333333&s=0&c=20201002)

![(0,1]](https://s0.wp.com/latex.php?latex=%280%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002)



















![\theta \in [-\pi,\pi]](https://s0.wp.com/latex.php?latex=%5Ctheta+%5Cin+%5B-%5Cpi%2C%5Cpi%5D&bg=ffffff&fg=333333&s=0&c=20201002)










































![h:[0,1]\rightarrow S](https://s0.wp.com/latex.php?latex=h%3A%5B0%2C1%5D%5Crightarrow+S&bg=ffffff&fg=333333&s=0&c=20201002)





![[1-\delta,1]](https://s0.wp.com/latex.php?latex=%5B1-%5Cdelta%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002)
![h([1-\delta,1])](https://s0.wp.com/latex.php?latex=h%28%5B1-%5Cdelta%2C1%5D%29&bg=ffffff&fg=333333&s=0&c=20201002)




![h:[0,1]\rightarrow \mathbb{R}^2](https://s0.wp.com/latex.php?latex=h%3A%5B0%2C1%5D%5Crightarrow+%5Cmathbb%7BR%7D%5E2&bg=ffffff&fg=333333&s=0&c=20201002)

![(p_1\circ h)([1-\delta,1])](https://s0.wp.com/latex.php?latex=%28p_1%5Ccirc+h%29%28%5B1-%5Cdelta%2C1%5D%29&bg=ffffff&fg=333333&s=0&c=20201002)





![[0,x_0]](https://s0.wp.com/latex.php?latex=%5B0%2Cx_0%5D&bg=ffffff&fg=333333&s=0&c=20201002)
![x_1\in (0,x_0]](https://s0.wp.com/latex.php?latex=x_1%5Cin+%280%2Cx_0%5D&bg=ffffff&fg=333333&s=0&c=20201002)

![t\in [1-\delta,1]](https://s0.wp.com/latex.php?latex=t%5Cin++%5B1-%5Cdelta%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002)





![f:[a,b] \rightarrow \mathbb{R}](https://s0.wp.com/latex.php?latex=f%3A%5Ba%2Cb%5D+%5Crightarrow+%5Cmathbb%7BR%7D&bg=ffffff&fg=333333&s=0&c=20201002) fonksiyonu olsun.
fonksiyonu olsun.  eğrisinin altında kalan alanı bulmak için,
eğrisinin altında kalan alanı bulmak için, ![[a,b]](https://s0.wp.com/latex.php?latex=%5Ba%2Cb%5D&bg=ffffff&fg=333333&s=0&c=20201002) aralığını n parçaya bölelim ve ilgili bölgede n adet dikdörtgen elde edelim. Daha sonra ise bu dikdörtgenlerin alanlarını toplayalım. Burada her bir dikdörtgenin kısa kenar uzunluğunun
aralığını n parçaya bölelim ve ilgili bölgede n adet dikdörtgen elde edelim. Daha sonra ise bu dikdörtgenlerin alanlarını toplayalım. Burada her bir dikdörtgenin kısa kenar uzunluğunun  olduğu açıktır. Uzun kenar için ise farklı seçimler yapmak mümkündür. Eğer, aşağıdaki şeklin sol kısmında görüldüğü gibi,
olduğu açıktır. Uzun kenar için ise farklı seçimler yapmak mümkündür. Eğer, aşağıdaki şeklin sol kısmında görüldüğü gibi, 
 noktası seçelim ve uzun kenarı
noktası seçelim ve uzun kenarı  olan dikdörtgenler oluşturalım. Oluşturulan tüm bu dikdörtgenlerin alanlarının toplamı
olan dikdörtgenler oluşturalım. Oluşturulan tüm bu dikdörtgenlerin alanlarının toplamı  olacaktır. Bu şekilde elde edilen toplamın ismi ise Riemann toplamıdır. Burada dikkat edilmesi gereken şey, dikdörtgenlerin sayısı ne kadar çok olursa, hata payının o kadar az olacağı ve alanın gerçek değerine o kadar yaklaşılmış olacağıdır.
olacaktır. Bu şekilde elde edilen toplamın ismi ise Riemann toplamıdır. Burada dikkat edilmesi gereken şey, dikdörtgenlerin sayısı ne kadar çok olursa, hata payının o kadar az olacağı ve alanın gerçek değerine o kadar yaklaşılmış olacağıdır. 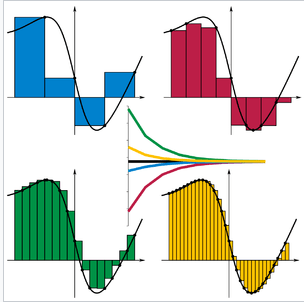

 üzerinde bir fonksiyon olarak seçersek, integral hesabı yaparken kullandığımız yöntemi bir üst boyuta taşımamız gerekir. Bu kez tanım kümemizi belli parçalara bölüp, fonksiyonun altında kalan bölgenin dikdörtgen prizmalarından oluştuğunu ve bu prizmaların hacimlerini topladığımızı düşünebiliriz. Bundan sonra yapılacak şey ise, biraz önce kullanılan yönteme benzer şekilde, x ve y-eksenini ayırdığımız parçaların sayısını sonsuza götürmektir.
üzerinde bir fonksiyon olarak seçersek, integral hesabı yaparken kullandığımız yöntemi bir üst boyuta taşımamız gerekir. Bu kez tanım kümemizi belli parçalara bölüp, fonksiyonun altında kalan bölgenin dikdörtgen prizmalarından oluştuğunu ve bu prizmaların hacimlerini topladığımızı düşünebiliriz. Bundan sonra yapılacak şey ise, biraz önce kullanılan yönteme benzer şekilde, x ve y-eksenini ayırdığımız parçaların sayısını sonsuza götürmektir. 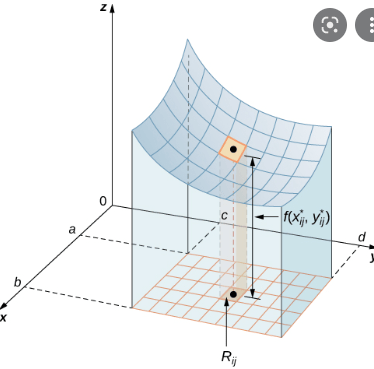
 ya da soyut bir
ya da soyut bir  uzayı olursa, bu kez nasıl bir yol izleyeceğiz? Daha geniş bir tanım kümesi ailesi için çözüm üretebilen bir integral alma yöntemimiz olsaydı fena olmaz mıydı? İşte Rieman integralinden daha genel bir integrale ihtiyaç duyulmasının sebeplerinden biri budur diyebiliriz.
uzayı olursa, bu kez nasıl bir yol izleyeceğiz? Daha geniş bir tanım kümesi ailesi için çözüm üretebilen bir integral alma yöntemimiz olsaydı fena olmaz mıydı? İşte Rieman integralinden daha genel bir integrale ihtiyaç duyulmasının sebeplerinden biri budur diyebiliriz. ![f: [0,1]\rightarrow \mathbb{R}](https://s0.wp.com/latex.php?latex=f%3A+%5B0%2C1%5D%5Crightarrow+%5Cmathbb%7BR%7D&bg=ffffff&fg=333333&s=0&c=20201002) ,
, ![f(x)= \begin{cases} 1 & x\in \mathbb{Q}\cap [0,1] \\ 0 & x\in \mathbb{I}\cap [0,1] \\ \end{cases}](https://s0.wp.com/latex.php?latex=f%28x%29%3D+%5Cbegin%7Bcases%7D+1+%26+x%5Cin+%5Cmathbb%7BQ%7D%5Ccap+%5B0%2C1%5D+%5C%5C+0+%26+x%5Cin+%5Cmathbb%7BI%7D%5Ccap+%5B0%2C1%5D+%5C%5C+%5Cend%7Bcases%7D&bg=ffffff&fg=333333&s=0&c=20201002) biçiminde tanımlı olan Dirichlet fonksiyonunu ele alalım.
biçiminde tanımlı olan Dirichlet fonksiyonunu ele alalım.  olarak bulunur. Diğer taraftan,
olarak bulunur. Diğer taraftan,  olur. Bu iki toplam birbirinden farklı olduğundan,
olur. Bu iki toplam birbirinden farklı olduğundan, 
 sürekli fonksiyonlar dizisi verildiğinde
sürekli fonksiyonlar dizisi verildiğinde
 fonksiyonunu ele alalım. Burada x-ekseni
fonksiyonunu ele alalım. Burada x-ekseni ![[c_{i-1}, c_i]](https://s0.wp.com/latex.php?latex=%5Bc_%7Bi-1%7D%2C+c_i%5D&bg=ffffff&fg=333333&s=0&c=20201002) aralığında kalan kısmının ön görüntüsüdür. Riemann integralini oluştururken, x-ekseni üzerinde elde ettiğimiz her bir parçanın görüntüsünü bulmuştuk ve fonksiyonumuz sürekli olduğundan, bu görüntülerin her biri bağlantılı bir küme olmuştu. Fakat görüyoruz ki, burada
aralığında kalan kısmının ön görüntüsüdür. Riemann integralini oluştururken, x-ekseni üzerinde elde ettiğimiz her bir parçanın görüntüsünü bulmuştuk ve fonksiyonumuz sürekli olduğundan, bu görüntülerin her biri bağlantılı bir küme olmuştu. Fakat görüyoruz ki, burada  olsaydı hacmini ölçebilirdik. Fakat burada, birbirinden farklı her tanım kümesi için ayrı ayrı işlem yapmamak adına, genel bir ölçü tanımına ihtiyacımız olacaktır. Yani daha kapsamlı bir integral elde etmek istiyorsak, herhangi bir
olsaydı hacmini ölçebilirdik. Fakat burada, birbirinden farklı her tanım kümesi için ayrı ayrı işlem yapmamak adına, genel bir ölçü tanımına ihtiyacımız olacaktır. Yani daha kapsamlı bir integral elde etmek istiyorsak, herhangi bir  -cebiri
-cebiri  ölçü uzayı üzerinde tanımlı olduğunu varsayalım ve bir
ölçü uzayı üzerinde tanımlı olduğunu varsayalım ve bir  ile gösterelim.
ile gösterelim.  ve
ve  herhangi bir nokta olmak üzere, genelleşmiş dikdörtgenlerin alanları toplamı
herhangi bir nokta olmak üzere, genelleşmiş dikdörtgenlerin alanları toplamı  olacaktır. Bundan sonraki süreç tıpkı Riemann integralinde olduğu gibi işler. Örneğin
olacaktır. Bundan sonraki süreç tıpkı Riemann integralinde olduğu gibi işler. Örneğin  ‘lerin seçimine göre alt ve üst toplamlar oluşur. Ekseni daha sık parçalara ayırmak ve tabii ki limit almak bizi Lebesque integralinin tanımına götürür:
‘lerin seçimine göre alt ve üst toplamlar oluşur. Ekseni daha sık parçalara ayırmak ve tabii ki limit almak bizi Lebesque integralinin tanımına götürür:
![\mathbb{Q}\cap [0,1]](https://s0.wp.com/latex.php?latex=%5Cmathbb%7BQ%7D%5Ccap+%5B0%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002) ‘in Lebesque ölçüsü sıfırdır. Diğer taraftan
‘in Lebesque ölçüsü sıfırdır. Diğer taraftan ![\mu(\mathbb{I}\cap [0,1])=1](https://s0.wp.com/latex.php?latex=%5Cmu%28%5Cmathbb%7BI%7D%5Ccap+%5B0%2C1%5D%29%3D1&bg=ffffff&fg=333333&s=0&c=20201002) ‘dir ve böylece
‘dir ve böylece ![\int_{0}^{1} f(x) d\mu=1\times \mu(\mathbb{Q}\cap [0,1])+0\times \mu(\mathbb{I}\cap [0,1])=0](https://s0.wp.com/latex.php?latex=%5Cint_%7B0%7D%5E%7B1%7D+f%28x%29+d%5Cmu%3D1%5Ctimes+%5Cmu%28%5Cmathbb%7BQ%7D%5Ccap+%5B0%2C1%5D%29%2B0%5Ctimes+%5Cmu%28%5Cmathbb%7BI%7D%5Ccap+%5B0%2C1%5D%29%3D0&bg=ffffff&fg=333333&s=0&c=20201002) olarak bulunur.
olarak bulunur.