
Nesneler arasındaki uzaklıktan anladığımız şey genelde onlar arasındaki en kısa mesafedir. Örneğin bir doğrunun bir düzleme ya da iki düzlemin birbirine olan uzaklığını bulurken, bu iki kümenin noktaları arasındaki minimum uzaklığı elde etmeye çalışırız. Peki bu, iki nesnenin birbirine yakın olduğunu söylemek için yeterince iyi bir yöntem midir? Yani, bu nesneler birbirlerine oldukça yakın birer noktaya sahip olmalarına rağmen, diğer noktalar için bu durum geçerli olmayabilir mi?
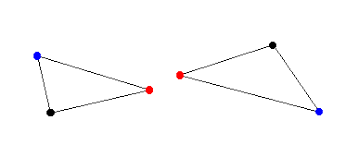
Örneğin yukarıdaki şekilde, iki üçgen arasındaki uzaklık değeri küçük olabilir, fakat şeklin geneline bakıldığında, bu değerin, mavi noktaların birbirine oldukça uzak olduğu gerçeğini yansıtmadığı açıktır. Şimdi yukarıdaki üçgenleri, aralarındaki uzaklık değişmeyecek şekilde, aşağıdaki gibi yeniden konumlandıralım.

Burada, konum değişmesine rağmen uzaklığın aynı kaldığını, dolayısıyla en kısa uzaklık kavramının nesnelerin konumundan tamamen bağımsız olduğu görebiliriz. Konu uygulamaya geldiğinde bu pek de istenilen bir özellik değildir. Neyse ki bu eksikliği ortadan kaldırmaya yardımcı olacak Hausdorff metriği vardır.
 kümesi
kümesiHausdorff metriğin tanımını vermeden önce, bu metriğin neyi ölçtüğüne bir bakalım. İlk olarak çalışacağımız kümelerin kompakt olduğunu kabul edelim. 








İlk olarak, 





Benzer şekilde, 


olarak seçeriz.
Hausdorff metriğinin en bilinen uygulamalarından biri, görüntü analizi, robotların görsel navigasyonu, bilgisayar destekli ameliyatlar gibi alanlarda kullanılan görüntü eşlemedir.

Yukarıdaki şekilde, solda verilen şablonun, sağdaki resimde olup olmadığını, varsa nerede olduğunu araştırırken Hausdorff metriği kullanılabilir. En iyi eşleşmeyi elde etmek için uzaklığın yeterince küçük olması gerekir.

Şimdi, asıl konumuza dönelim ve Hausdorff metriğin fraktal görüntü işleme alanında nasıl kullanıldığına bakalım.
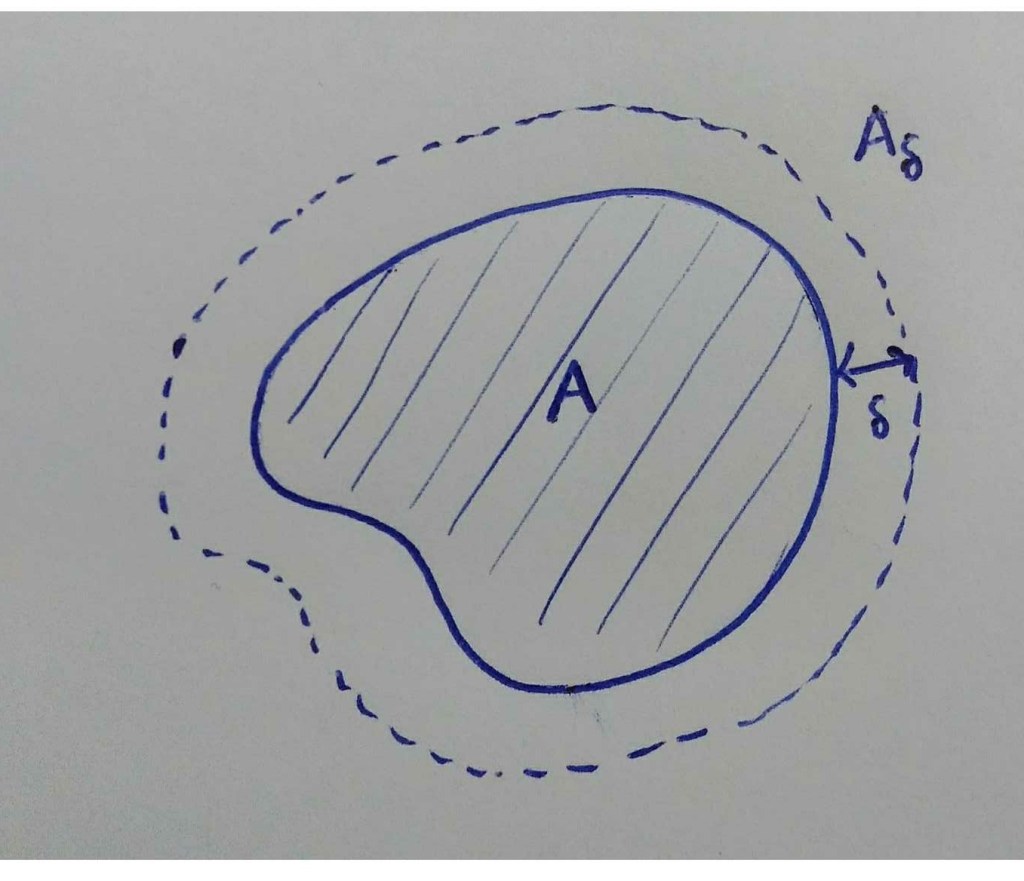
Bir bilgisayarda görüntü depolarken karşılaşılan en temel sıkıntılardan biri depolama alanının kısıtlı olmasıdır. Görüntüyü depolarken, onu bir şekilde (sonlu bir) sıfırlar ve birler dizisine çevirmemiz gerekir. Bunu yapmak için görüntünün üzerine bir piksel ağı yerleştirdiğimizi ve bilgisayarın her pikselin değerini belleğine kaydettiğini düşünelim. Bir pikselin değeri, o noktadaki görüntünün siyah veya beyaz olmasına bağlı olarak 0 ya da 1 olsun. Bu yöntemde, görüntünün çözünürlüğü piksellerin büyüklüğüne bağlı olacaktır. Kullandığımız piksel sayısı depolama alanı ile sınırlıdır ve bu durum görüntünün netliğini ve ne kadar detaya sahip olup olmayacağını doğrudan etkiler. Bu sorunu çözmek fraktal sıkıştırma yöntemi kullanılabilir. Bunun için, işlemek istediğimiz görüntüye A diyelim ve 





koşulunun sağlanması anlamına gelir. (Burada H Hausdorff metriği gösterir.) Bu yöntem sayesinde, tüm görüntüyü depolamak yerine
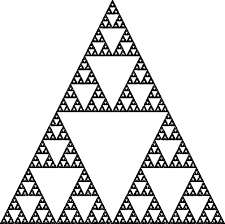
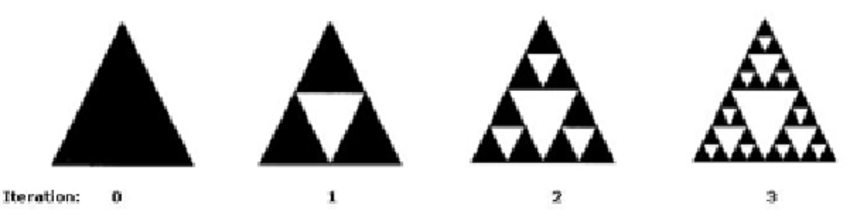
Yukarıda Sierpinski üçgeni ve onu elde etmek için kullanılan ilk üç iterasyonu görüyoruz. Bu üçgeni saklamak yerine, iterasyon kuralını saklamak tabii ki daha az yer kaplayacaktır.
Şimdi yukarıda anlatılanların matematiksel boyutuna bir bakalım.





Şimdi de 



![A=[3,4], B=[4,6]](https://s0.wp.com/latex.php?latex=A%3D%5B3%2C4%5D%2C+B%3D%5B4%2C6%5D&bg=ffffff&fg=333333&s=0&c=20201002)


Teorem: 


Bir görüntüyü 
Teorem: 

Şimdi,
Tanım: 



Teorem (Banach sabit nokta teoremi): 





Demek ki, 

Lemma:
1) 

2) 



Bu Lemma ile, X üzerinde tanımlı her daraltma dönüşümünün aynı zamanda
Lemma: 





Tanım: 
Eğer 



İşlemek istediğimiz bir görüntüyü, 
Şimdi bir 







Son olarak aşağıdaki teorem ile, her görüntü için daha basit, yani bir anlamda depolanması daha kolay olacak bir IFS bulmanın mümkün olduğu görelim.
Teorem (Kolaj Teoremi): 


olacak şekilde, 


Dolayısıyla, atraktörü, elimizdeki görüntüye yakın olan bir IFS bulmak için, yukarıdaki teoremde verilen (*) koşulunu sağlayan daraltma dönüşümleri bulmak gerekir. Bu teorem, belirli bir fraktal için bir IFS bulma problemini hemen çözmese de, probleme nasıl yaklaşılması gerektiği konusunda rehberlik eder.
Yukarıda kısaca anlattığımız, verilen bir görüntüyü, bir IFS ile temsil etme yöntemi “Fraktal Görüntü Sıkıştırma” olarak adlandırılır.
Son olarak, burada Kolaj Teoremi kullanılarak üretilmiş bir fraktal örneği bulabilirsiniz. Burada ise, Kolaj Teoreminin sahibi Michael Barnsley’in “Fractals Everywhere (Fraktallar Her Yerde)” adlı kitabında tanımladığı Barnsley Eğrelti otu isimli fraktalı elde etmek için kullanılan ve dört afin dönüşümden oluşan IFS’yi inceleyebilirsiniz.

Fraktallar her yerde olabilir, tamam, ama matematik de her yerdedir! 🙂
Kaynaklar
1)https://www.math.arizona.edu/~flaschka/Topmatter/527files/termpapers/mcmillen.pdf
2)https://www.youtube.com/watch?v=zGKfU91-hU0
3)http://cgm.cs.mcgill.ca/~godfried/teaching/cg-projects/98/normand/main.html
